磁性マイクロワイヤを用いたFRPの非接触モニタリング
磁性マイクロワイヤを用いたFRPの非接触モニタリングということについて述べてみたいと思います。
FRP適用動機変化に伴う破壊形態の変化
FRPが湿式プレミックスとして初めて世の中に出回り始めたころは、
絶縁性に加え、任意の形状に賦形(ふけい)しやすいということにありました。
しかし強化繊維や樹脂の改質が進んだ結果、
FRPが適用される動機として比強度、比剛性が高いという観点が一般的になっています。
強度や剛性が高いということに着眼されるようになった結果、
その適用先は「構造部材」になることが急増しました。
構造部材に求められるのは上記の軽量高強度はもちろんですが、それ以前に
「長期間使える耐久性があるのか」
ということが重要になります。
しかし構造部材に用いられるようなFRPは繊維量が増加する上、繊維長も伸び、
中には連続繊維を強化繊維とするケースもあるため強い異方性が発現。
この異方性発現の結果、破壊形態そのものにも異方性が見られるようになったため、
FRPの破壊形態は外観からは判断が難しいトランスバースクラックや層間剥離が支配的となったのです。
長期耐久性が求められる一方、
その破壊が外観から判定が難しい場合に重要となるのがセンシング技術を用いたモニタリングになります。
過去にはAEや光ファイバをモニタリング技術として紹介したこともあります。
・関連コラム
アコースティックエミッションを TypeIV の高圧タンク品質管理に採用
今回はこのモニタリング手法の一候補になり得る、
磁性マイクロワイヤについて述べてみたいと思います。
磁性マイクロワイヤによるセンシング技術の概要
磁性マイクロワイヤによるセンシングそのものは1970年代から研究が行われており、
比較的歴史の長い技術のようです。
元々は Emilio Villari というイタリアの研究者が、
磁性体にトルクや荷重をかけると磁界が変化する事を19世紀に発見したことが原点にあります。
Magnetoelastic Effect と呼ばれる事象がこれに該当します。
強制的に磁性体が形成する磁界を制御することで、
上記のような変形を磁界の変化として捉えることが可能となります。
この辺りは以下のような動画をご覧いただくとイメージがわくかもしれません。
また磁性マイクロワイヤは大変小さい上に非接触で様々なデータの取得が可能であるため、
産業用途に限らず、人体に埋め込むといった医療用途を目的とした研究もされているようです。
・関連文献
Advanced functional magnetic microwires for magnetic sensors suitable for biomedical applications
この技術の概要を以下の文献を参考に見ていきたいと思います。
・参照文献
POSSIBILE APPLICATIONS OF MAGNETIC MICROWIRES IN AVIATION
センシングの基本にあるのは Barkhausen jump という現象
磁性マイクロワイヤの磁性的挙動はその形状によって決まります。
マイクロワイヤは円柱形状が基本ですので、
より具体的には直径と長さとなります。
もう一つこの特性を決める要因が、
磁気ひずみと内部応力によって生じる「magnetoelastic anisotropy(磁気弾性異方性)」です。
磁性的挙動とは何でしょうか。
縦軸に磁束密度、横軸に磁化力を取ると顕著なヒステリシスを示すことが知られており、
これが Barkhausen jump(バルクハウゼンジャンプ)というものです。
上記の参照文献でいうとFig.3に示されています(下図参照)。
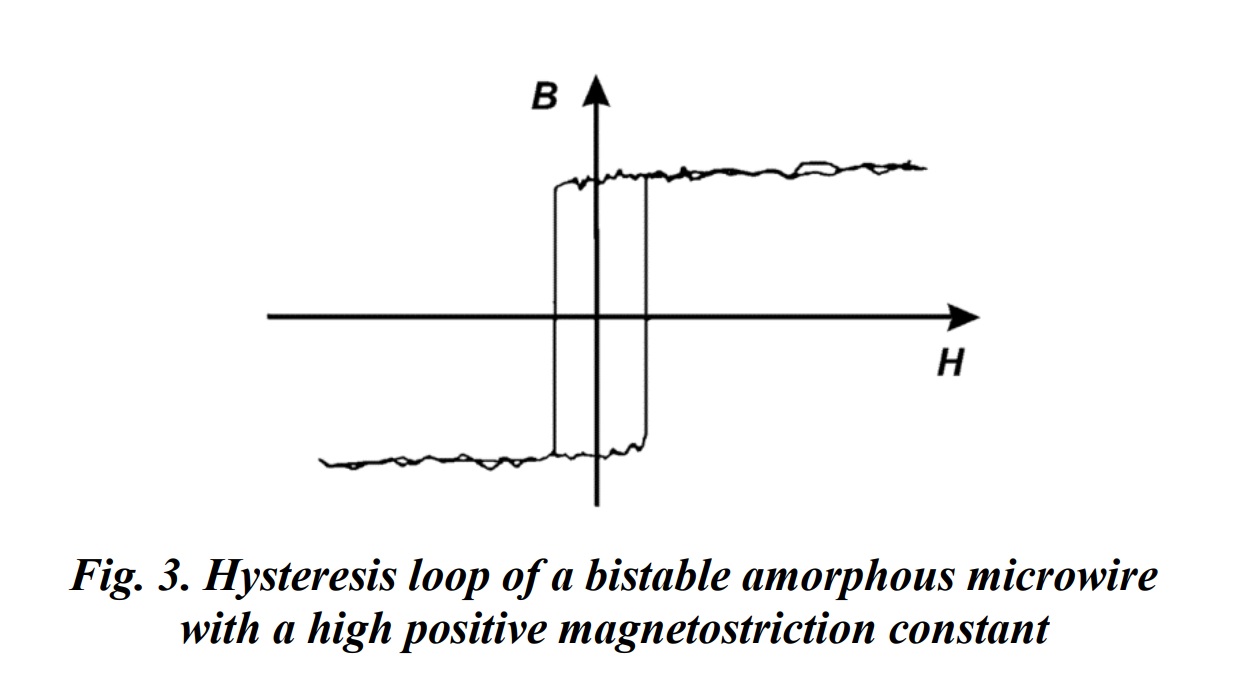
Image above was referred from POSSIBILE APPLICATIONS OF MAGNETIC MICROWIRES IN AVIATION
この急激な磁束密度の変化が起こる磁化力の数値は磁性体、
つまり今回でいうマイクロワイヤがさらされる温度や変形荷重によって変化する、
ということが知られています。
同参照文献のFig.4を見ると引張応力や温度変化に応じて、
磁性マイクロワイヤの示す磁束密度の変化が起こる磁化力の数値変化が示されています(下図参照)。
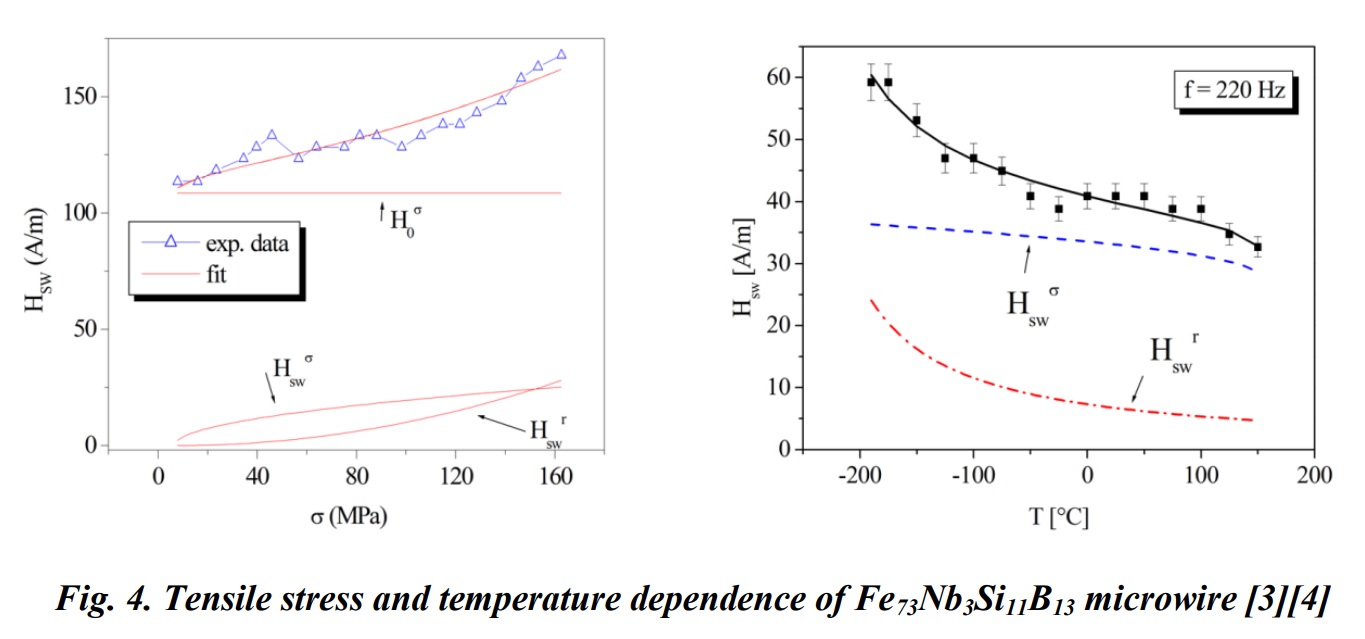
Image above was referred from POSSIBILE APPLICATIONS OF MAGNETIC MICROWIRES IN AVIATION
この変化を実際の数値変動に置き換えるというのがセンシング技術のコンセプトになります。
変化の挙動は非接触でとらえる
実際の磁性マイクロワイヤが捉えた変化をどのようにデータとして取得するのでしょうか。
その一例として示されているのが、
電磁石を近づけた際の磁性マイクロワイヤの応答を電流として捉えるというものです。
電磁誘導の現象を用いていると考えます。
以下で示す RVmagnetics の動画では磁界を発生させる励振コイルと、
これに対する磁性マイクロワイヤの応答を捉える検出コイルを分けている、
というコンセプトが紹介されています。
上記の動画の事例だと、10cm程度離れていても検出は可能と述べられています。
磁性マイクロワイヤの基本構成
金属のフィラメントの外側をガラスでコーティングした形状をしています。
一般的には Pyrex glass(パイレックスガラス)という線膨張係数の小さな材料を使います。
そして極めて細い形状であるため、ガラスでコーティングされているにも関わらず柔軟性があります。
作り方の一例が参照文献のFig.2に示されています。
マイクロワイヤのコア素材となる合金がガラスチューブの中に入っており、
それを外側から高周波誘導加熱によって加熱を行い、
合金とガラスが溶融して糸のような形状になったものを、
冷却しながら引き出すようなイメージのようです。
上記で紹介した RVmagnetics の動画の1’41″辺りから磁性マイクロワイヤを作っている様子が紹介されています。
金属は鉄系の非晶性合金。
RVmagneticsの情報を一例とすると、
金属成分はFe38.5Ni39Si7.5B15 または Fe76Si9B10P5です。
RVmagneticsのセンサの一例は以下のサイトで紹介されています。
これを見ると、磁性マイクロワイヤの直径は3?70μm、
コア材(金属)は同1?50μm、ガラスコーティング厚みは2?20μmとのことです。
荷重、温度、磁界の計測が得意
これは実際のイメージを持つ方が早いと思いますので、
デモの動画をご紹介します。
温度計測のイメージは以下になります。
マイクロワイヤは樹脂の表面に接着されています。
荷重についても同様に以下で見ることができます。
検出器に近づけた状態で磁性マイクロワイヤを適用した供試体の変化を、
リアルタイムでモニタリングできていることがわかります。
センサーが繊維形態であることは、FRP適用においてメリットとなる
磁性マイクロワイヤをFRPに適用することについて考えてみます。
磁性マイクロワイヤは温度、荷重、磁界に加え、
振動や湿度といったものも間接的に捉えることが可能のようです。
そのため、FRPとしても様々なターゲットデータに対するモニタリングが想定されます。
まず、このセンサが繊維形状であるためFRPとの相性は良いと期待されます。
FRPが強化繊維とマトリックス樹脂から構成される複合材料である、
というコンセプトにおいて、+αとして強化繊維に磁性マイクロワイヤというセンサを適用することになります。
これはまさに複合材料に付加価値をつけるという取り組みと同等といえるでしょう。
冒頭に述べた長期信頼性担保という課題の解決または改善に近づくことができます。
非接触によるセンシングはモニタリング対象物の形状の影響が少ない
今回の磁性マイクロワイヤというセンサは外部から磁界を近づけた際の応答を電流として取り出すため、
検出器とセンサを接触させる必要がありません。
FRPは実際に使われる状態において平面形状であることは殆ど無く、
必ずといっていいほど凹凸が存在します。
非接触であればこのような凹凸に関わらず必要なデータを取得することができます。
そのため、非接触というセンシングシステムはFRPのモニタリングに向いているといえます。
加えて、センサそのものには外部電源が不要というのもポイントです。
尚、検出器は強制的に磁界を発生させるため電源が必要です。
微小形状のため、FRP特性に影響を与えにくい
磁性マイクロワイヤは連続繊維として取り入れるわけではなく、
捉えたい変化事象に適した長さ寸法を設定するのが一般的のようです。
このような繊維はそもそも直径がミクロンオーダであるためFRPに取り入れた場合、
大きな影響を与えるとは考えにくく、
磁性マイクロワイヤの導入はFRP特性に影響を与えないと考えて問題ないでしょう。
磁性マイクロワイヤには検出したいものによって設計が必要
磁性マイクロワイヤにも課題があります。
より正確には特性というべきかもしれません。
それは、
「磁性マイクロワイヤは形状や組成で特性が変わる」
ということです。
磁性マイクロワイヤは Barkhausen jump という性質の外的環境による変化を捉えることで、
センサとして機能することを述べました。
そして当該特性は断面と繊維長の関係によって変化することに加え、
コア材である合金の組成によっても変化します。
magnetoelastic anisotropyというのは大変センシティブな特性といえるかもしれません。
上記で紹介した MicroWire sensor Data Sheet で寸法などに幅があるのは、
センサ用途としての設計が都度必要であるということの裏返しだと考えます。
特定の仕様を指定して購入するといった市販品感覚は通用せず、
何を捉えたいか、その条件は何か、精度は何かといった細かい要件を、
購入者側がきちんと理解するという技術的な視点が不可欠です。
FRPの異方性や成形工程が磁性マイクロワイヤの適用を難しくする可能性もある
磁性マイクロワイヤは埋め込まれた、または接着された構造体の線膨張係数の影響を受けます。
忘れてはいけないのはFRP自身も線膨張係数があり、
しかもその線膨張自体にも「異方性」があるということです。
仮に磁性マイクロワイヤが想定した箇所で、
角度が異なって埋め込まれてしまった場合、
検出コイルによって得られる電流値が、
仮に同じ温度や荷重であっても当該角度に応じて異なる数値を示す可能性があります。
そしてFRPは一度マトリックス樹脂が低粘度化することで賦形されるため、
磁性マイクロワイヤが規定した箇所に固定設置することは難しい可能性もあります。
また成形工程における強化繊維の面内や層間の移動に伴う変形や高い圧力によって、
磁性マイクロワイヤ自体が耐えられない可能性もゼロではありません。
適したモニタリングを行うためには、
このような課題も乗り越えなくてはいけないでしょう。
いかがでしたでしょうか。
課題についても述べましたが、
個人的には大変興味深い技術という認識です。
ただし磁性マイクロワイヤは、
センサそのものの設計に加え、その設計に必要な取得したいデータを予め理解するということが不可欠で、
モニタリング技術を導入する側にも広くて高い技術的視点が必須となります。
分業や異業種技術にとらわれない考え方がますます重要になっていると感じます。